No.10
标签:多模态信息融合与注意力机制用于驾驶员认知工作负荷实时识别
前言
《Real-Time Driver Cognitive Workload Recognition: Attention-Enabled Learning With Multimodal Information Fusion》
期刊:IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
年份:2024
分区:Q1,一区Top;IF:7.2
作者:Haohan Yang, Jingda Wu, Zhongxu Hu, Member, IEEE, and Chen Lv, Senior Member, IEEE
主要单位:School of Mechanical and Aerospace Engineering, Nanyang Technological University
用“动态时序建模(HyperLSTM)+ 决策层注意力融合”来解决多模态 workload 识别中的个体差异 + 信息冗余问题
一、研究背景与问题定位
1. 背景
- 问题: 驾驶员在驾驶过程中同时处理导航、娱乐等任务会显著增加认知负荷,增加事故风险。
- 目标: 实时识别驾驶员的认知负荷水平(轻度、中度、高度),以支持人机协同驾驶、预警和接管控制。
2. 挑战
- 单一模态(如仅用EEG或车辆状态)信息不足;
- 个体差异大,传感器信号易受噪声干扰;
- 实时性要求高,模型需具备良好的时序建模能力。
二、模型构建
1. 整体架构
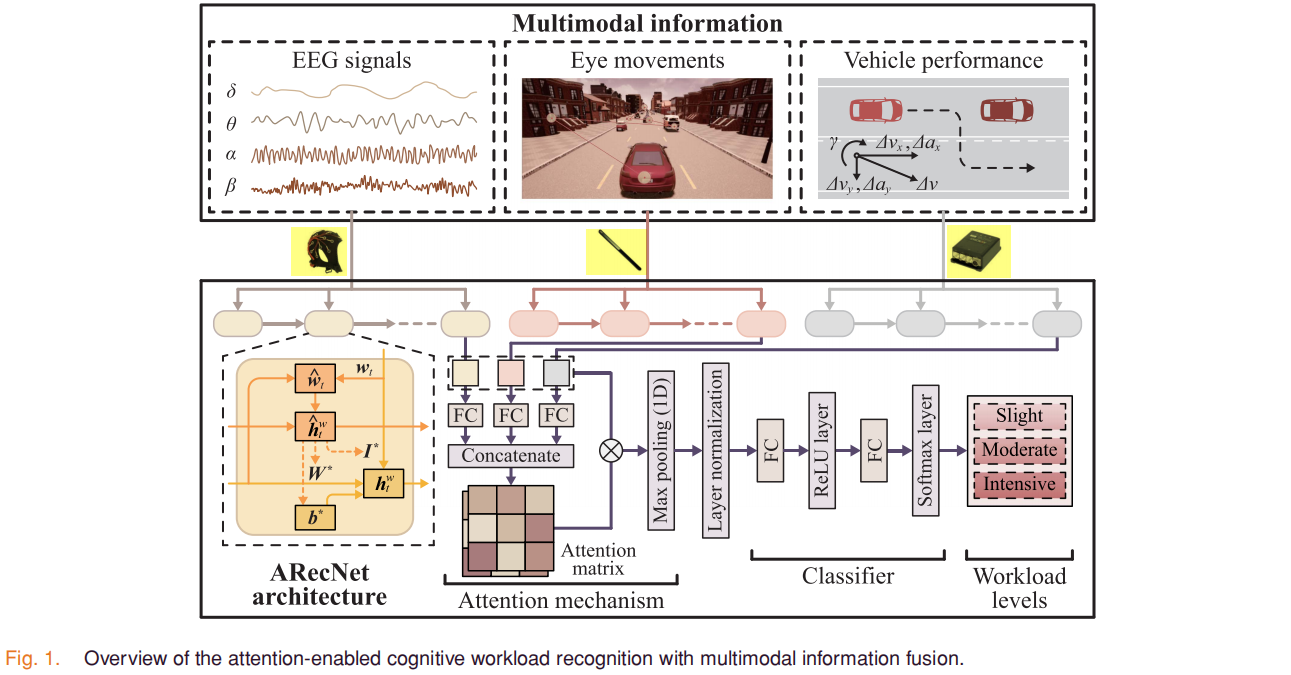
多模态输入(EEG + Eye + Vehicle)
↓
HyperLSTM ×3(每个模态一个)
↓
Cross-Attention(模态间关系建模)
↓
Decision-level Fusion(max pooling)
↓
Classifier(MLP)
👉 关键:不是 feature-level fusion,而是 decision-level fusion
2. HyperLSTM 模块
✔️ 本质
普通 LSTM:权重是固定的
HyperLSTM:用一个“小网络”动态生成主网络的权重
👉 公式核心:
主LSTM参数:W,I,b=f(HyperLSTM hidden)
👉 含义:模型可以“根据输入动态改变自身结构”
✔️ 为什么重要?
论文明确指出问题:不同驾驶员之间差异大(pattern variation)
👉 传统 LSTM:一个固定模型 → 泛化差
👉 HyperLSTM:自适应个体差异
3. Cross-Attention 模块
✔️ 实现方式
$Matt=softmax(s^Ts)$
👉 本质:模态之间做相似度矩阵
然后:hatt=maxpool([hw,hm,hv]⋅Matt)
❗ 这不是 Transformer attention
❗ 只是一个 3×3 模态关系矩阵
👉 非常“轻量级 attention”
✔️ 真正作用
👉 实际效果:做了一点 模态重加权,并不是结构创新
3. Decision-level Fusion(亮点)
传统多模态:early fusion(拼接特征)
这篇论文:late fusion(决策级)
👉 流程:
每个模态独立编码,最后再融合
✔️ 为什么有效?
| 方法 | 问题 |
|---|---|
| early fusion | 模态噪声互相污染 |
| decision fusion | 每个模态先“干净学习” |
4. 训练策略(亮点)
✔️ Seq2Seq loss
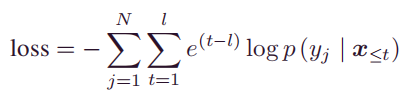
👉 特点:越后面的时间权重越高,同时利用 early information
👉 本质:early prediction + temporal consistency
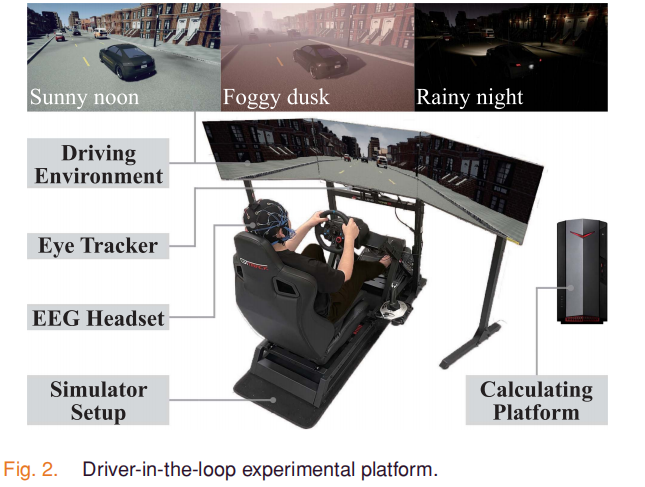
三、实验设计
1. 实验平台与设备
- 驾驶模拟器:Logitech G29
- 眼动仪:Tobii Pro(红外)
- EEG设备:EMOTIVE EPOC Flex(32通道)
- 场景模拟:Carla 模拟器,三种天气:晴天中午、雾霾黄昏、雨夜
2. 认知负荷调控方式
采用 n-back 任务变体,分为三个等级:
| 负荷等级 | 任务描述 |
|---|---|
| 轻度 | 仅驾驶任务(避障 + 到达目的地) |
| 中度 | 驾驶 + 视觉任务(回忆前一个障碍物颜色类别) |
| 高度 | 驾驶 + 视觉任务 + 听觉任务(识别连续字母中重复出现的字母对) |
- 所有实验中都存在音频刺激,但仅高负荷组需响应;
- 障碍物位置采用自定义离散分布,避免长时间无障碍物。
四、数据分析与主要结果
1. 模态对比(图5)
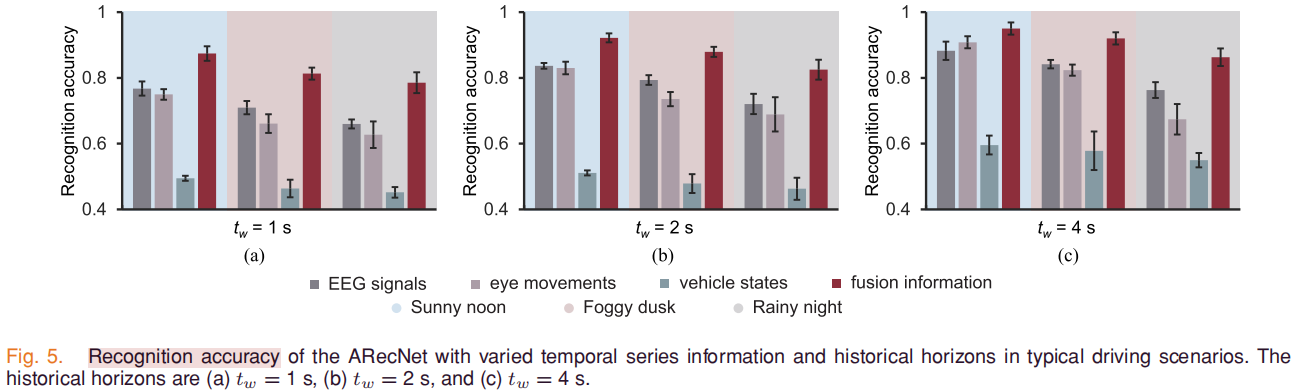
- 多模态融合显著优于单模态(EEG、眼动、车辆状态单独使用);
- 在低可见度场景(雨夜)中,单模态性能下降明显,但融合模型保持稳定。
2. 历史窗口长度影响(图6)
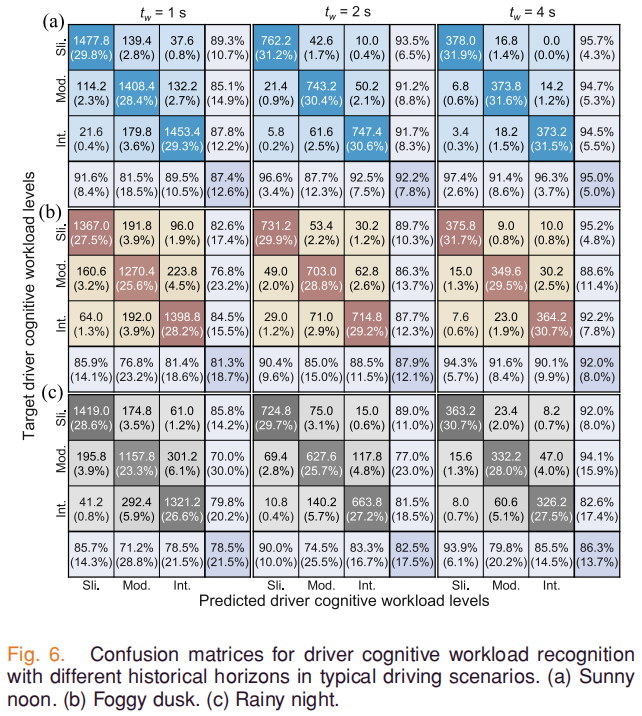
- 随着 tw 从 1s 增加到 4s,识别准确率从约 78–87% 提升至 95%;
- 轻度与高度负荷容易被误判为中度,提示可设计自适应阈值。
3. 决策阈值与 PR 曲线(图7)
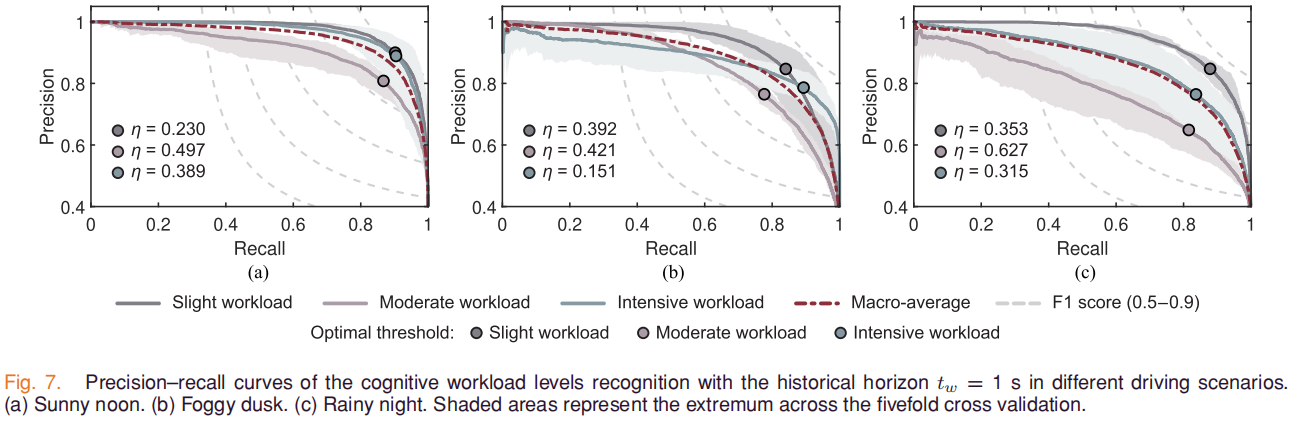
- 不同负荷等级的最优决策阈值不同;
- 可个性化调整阈值以平衡安全性与驾驶体验(如降低高负荷阈值以提高安全性)。
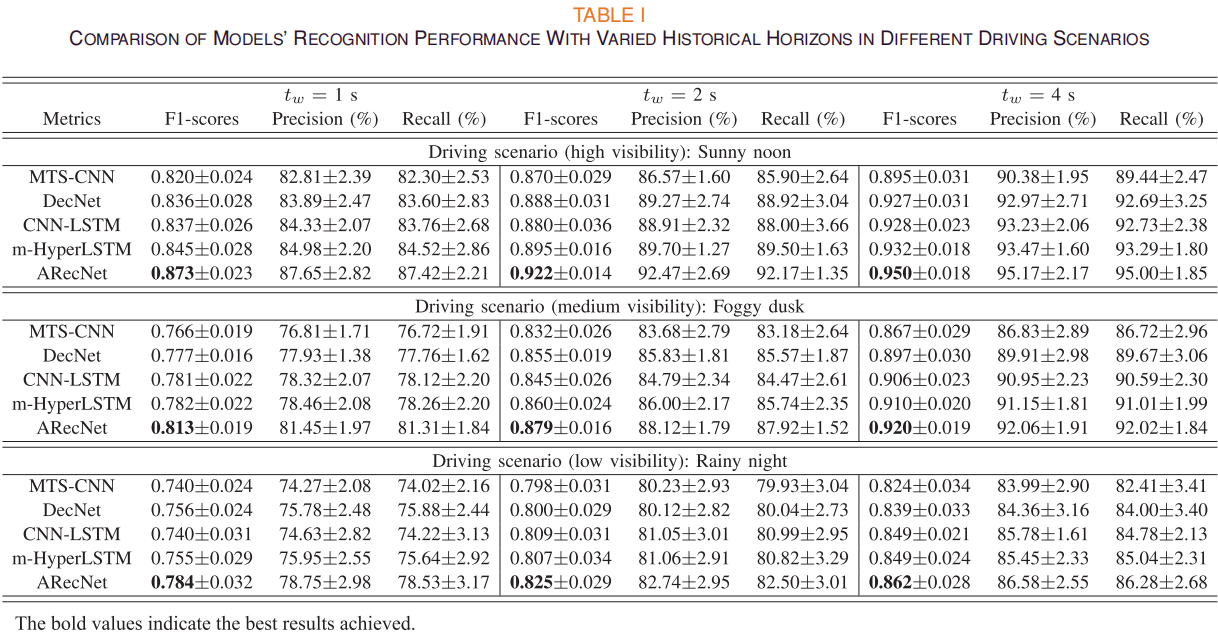
4. 与基线模型对比(表 I)
| 模型 | 特点 | F1 分数(t_w=1s) |
|---|---|---|
| MTS-CNN | 多变量时序CNN | 较低 |
| DecNet | 单LSTM | 中等 |
| CNN-LSTM | 卷积+循环 | 中等 |
| m-HyperLSTM | 特征级融合 HyperLSTM | 较高 |
| ARecNet(本文) | 决策级融合 + 注意力 | 最高(+3.32%以上) |
5. 消融研究(表 II、图8)
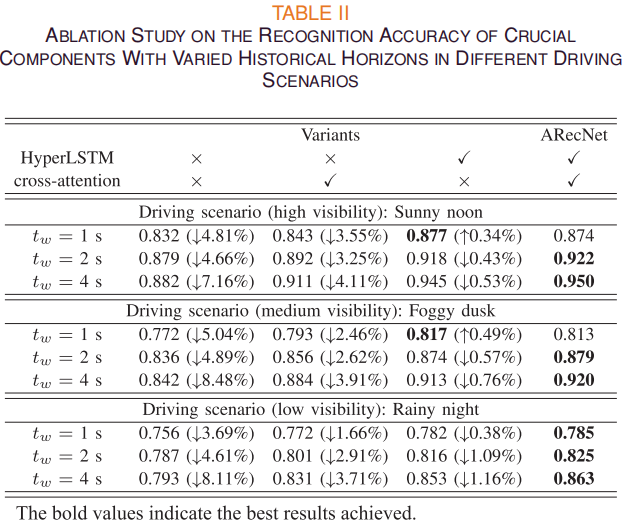
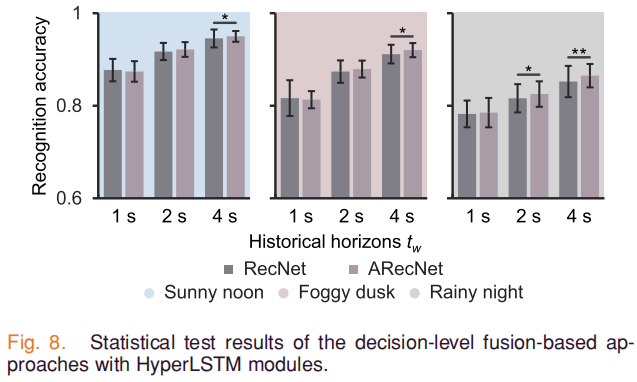
- HyperLSTM 显著优于普通 LSTM(p < 0.01);
- 交叉注意力 在短历史窗口(1s)下提升显著(p < 0.05)。
6. 鲁棒性测试(表 III)
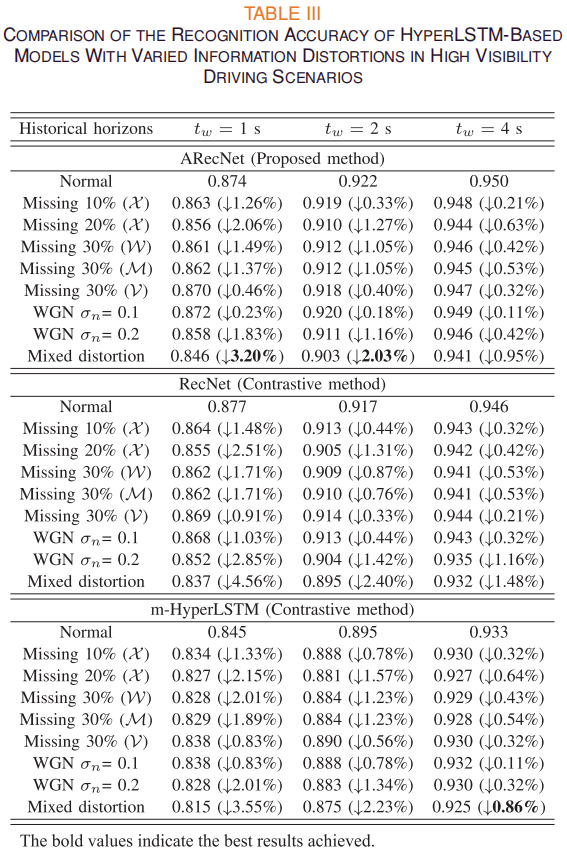
- 在信息缺失(10–30%)和高斯白噪声(σ=0.2)下,ARecNet 性能下降最小;
- 长历史窗口(4s)对噪声更具鲁棒性;
- 决策级融合 + 注意力机制在短窗口下提升鲁棒性更明显。
7. 实时推理与优化(图9)
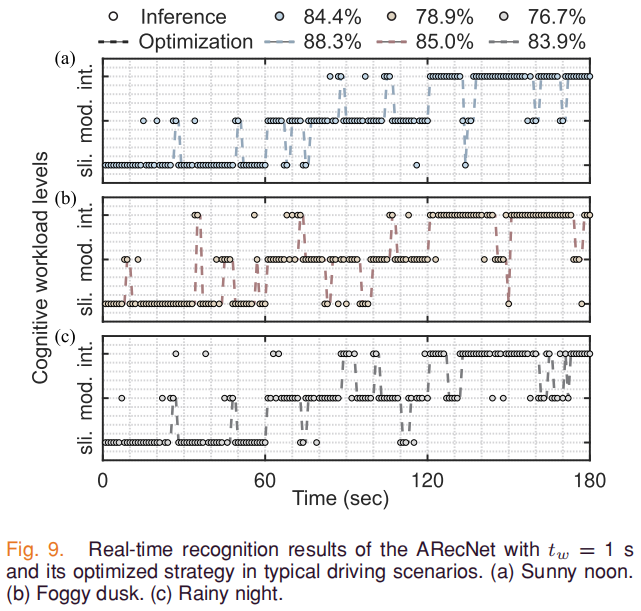
- 实时推理准确率略低于离线测试(下降约 1.8–3.0%);
- 采用“多数投票”优化(当前+前两步预测)可提升准确率最多 7.2%。
五、论文亮点总结
⭐ 亮点1:HyperLSTM(最核心):动态参数 → 适应个体差异,比普通LSTM强很多
⭐ 亮点2:Decision-level fusion:避免模态干扰,实验证明优于 early fusion
⭐ 亮点3:完整实验体系:多场景;多时间窗口;阈值分析;实时测试;鲁棒性测试
⭐ 亮点4:工程导向强:可实时;可调阈值;可部署 ✔️ TIE很看重



